Command Line Interface¶
d3rlpy provides the convenient CLI tool.
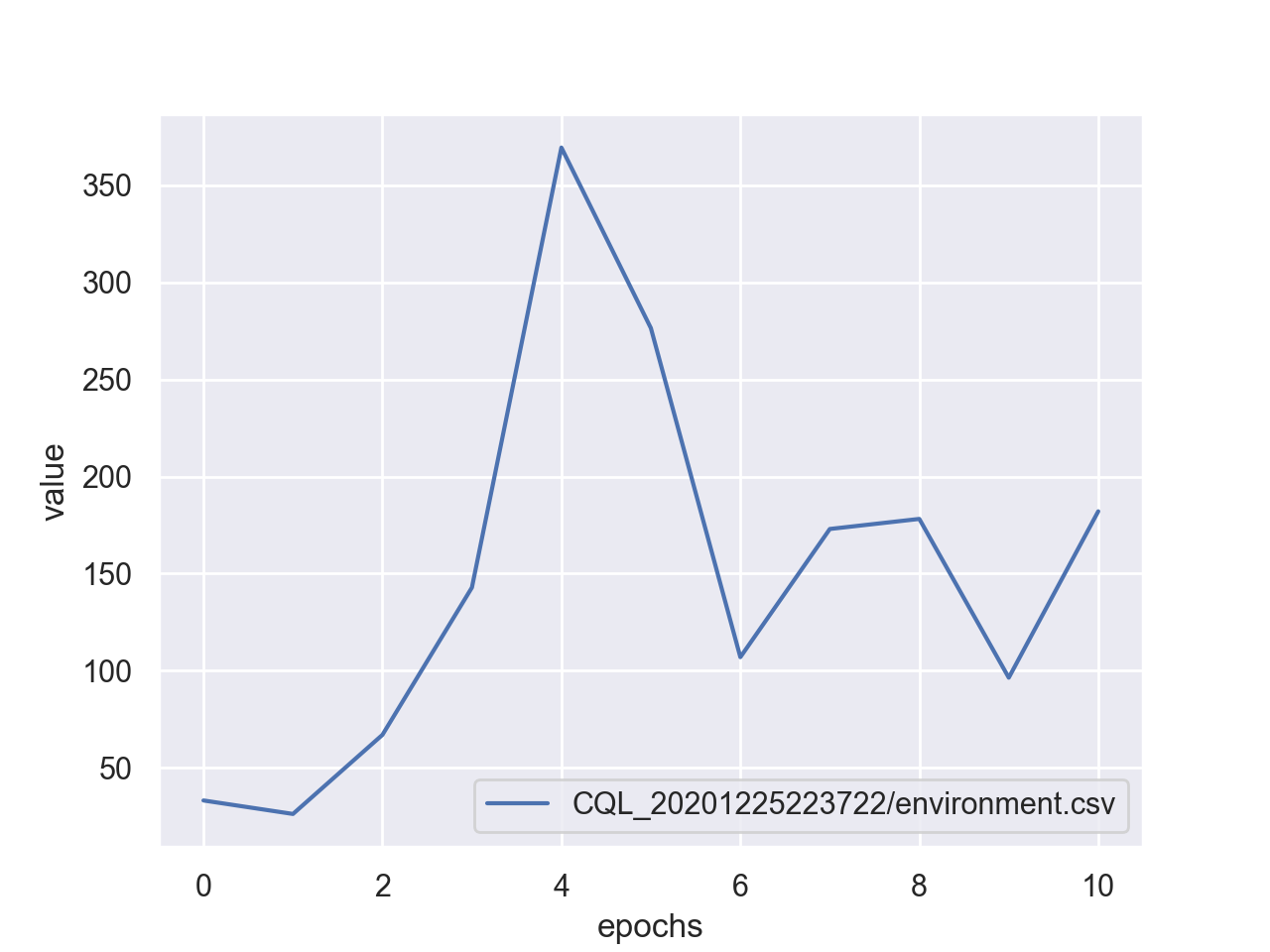
plot¶
Plot the saved metrics by specifying paths:
$ d3rlpy plot <path> [<path>...]
option |
description |
|---|---|
|
moving average window. |
|
use iterations on x-axis. |
|
show maximum value. |
|
label in legend. |
|
limit on x-axis (tuple). |
|
limit on y-axis (tuple). |
|
title of the plot. |
example:
$ d3rlpy plot d3rlpy_logs/CQL_20201224224314/environment.csv
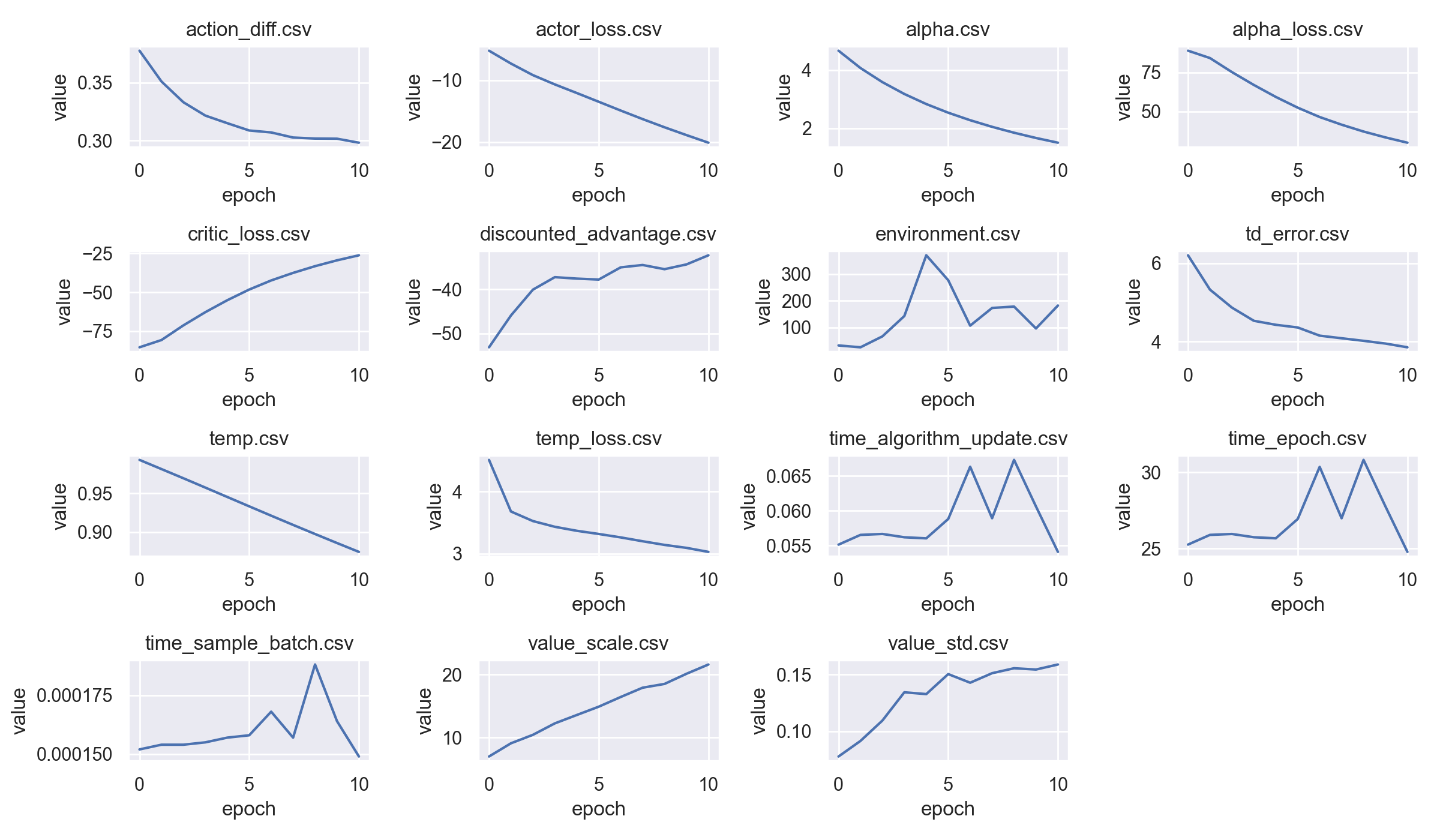
plot-all¶
Plot the all metrics saved in the directory:
$ d3rlpy plot-all <path>
example:
$ d3rlpy plot-all d3rlpy_logs/CQL_20201224224314
export¶
Export the saved model to the inference format, onnx and torchscript:
$ d3rlpy export <path>
option |
description |
|---|---|
|
model format (torchscript, onnx). |
|
explicitly specify params.json. |
|
output path. |
example:
$ d3rlpy export d3rlpy_logs/CQL_20201224224314/model_100.pt
record¶
Record evaluation episodes as videos with the saved model:
$ d3rlpy record <path> --env-id <environment id>
option |
description |
|---|---|
|
Gym environment id. |
|
arbitrary Python code to define environment to evaluate. |
|
output directory. |
|
explicitly specify params.json |
|
the number of episodes to record. |
|
video frame rate. |
|
images are recored every |
|
\(\epsilon\)-greedy evaluation. |
example:
# record simple environment
$ d3rlpy record d3rlpy_logs/CQL_20201224224314/model_100.pt --env-id HopperBulletEnv-v0
# record wrapped environment
$ d3rlpy record d3rlpy_logs/Discrete_CQL_20201224224314/model_100.pt \
--env-header 'import gym; from d3rlpy.envs import Atari; env = Atari(gym.make("BreakoutNoFrameskip-v4"), is_eval=True)'
play¶
Run evaluation episodes with rendering:
$ d3rlpy play <path> --env-id <environment id>
option |
description |
|---|---|
|
Gym environment id. |
|
arbitrary Python code to define environment to evaluate. |
|
explicitly specify params.json |
|
the number of episodes to run. |
example:
# record simple environment
$ d3rlpy play d3rlpy_logs/CQL_20201224224314/model_100.pt --env-id HopperBulletEnv-v0
# record wrapped environment
$ d3rlpy play d3rlpy_logs/Discrete_CQL_20201224224314/model_100.pt \
--env-header 'import gym; from d3rlpy.envs import Atari; env = Atari(gym.make("BreakoutNoFrameskip-v4"), is_eval=True)'